


●前身となる「R-One計画」の成功と課題
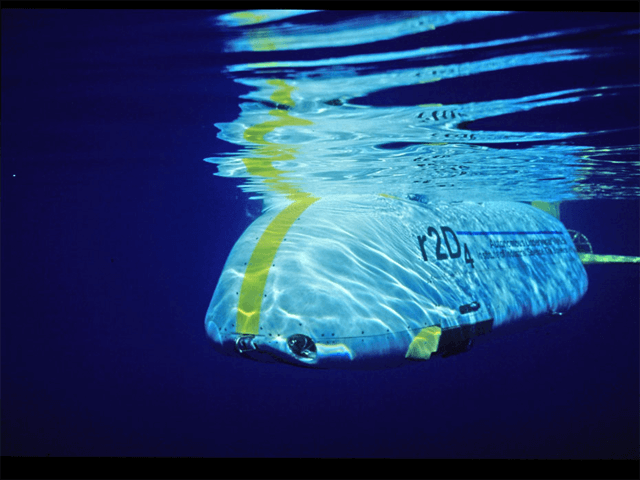
第5回は、「浦の自律型海中ロボットr2D4は何をしてきたか」ということで、非常に画期的なインド洋中央海嶺の潜航について説明し、楽しいロボット研究のご紹介をしたいと思います。
調査は2006年に実施し、2007年に海洋調査技術学会で発表しました(2007年11月16日)。この調査で、r2D4は、インド洋の中央海嶺の真ん中に溶岩大平原が広がっていることを発見しました。それを「ドードー溶岩大平原」と私が名前を付けました。画期的な発見でした。その後、有人潜水船が調査に行き、そこに熱水地帯を確認したりもします。ドードーとは、モーリシャスとその付近の島に生息し、18世紀までに絶滅した鳥の名前です。
まず、「生研の中央海嶺観測プログラム」の説明をしたいと思います。先ほどの説明では割愛しましたが、r2D4の前に「R-One計画」というものを、われわれはやっていました。「Toward Ridge System」ということで、中央海嶺系を観察するようなロボットをつくろうと。中央海嶺は非常に長い海底の山脈です。そのため、比較的大型で、海底で長距離を走って詳しい調査ができるようなロボットが必要です。そこで、最初に1990年、R-One計画を始めました。
この計画で、5年かかって、写真(右・上)の「R-One Robot」が完成し、進水します。これは長さが8.2メートル、重さは4トンです。100キロ走れるロボットをつくったのですが、なかなか大変でした。
1996年に最初に海で潜航し、98年に12時間連続潜航しました。この写真(右・中)は12時間の連続潜航が終わって夜中の12時ごろに皆で集まって「ああ、疲れた」と慰労している記念写真ですが、本当に疲れました(笑)。これで一応当初の目的をスペック的には成し遂げました。しかし、何も観測はしていません。それは、この頃はまだデバッグが大変だったからです。1995年にハードウエアができてから、ちゃんと動くものになるまで3年もかかりました。その間にデバッグをし、さらにその翌年もデバッグを続けました。
そして、2000年に手石海丘(ていしかいきゅう)調査を行いました。この写真(右・上)の背後に写っているのが伊豆半島で、伊東の町が向こうに見えるはずですが、その伊東市沖で1989年に海底噴...