



●海底地形図の分解能を高めるには海底に近づけばよい
これから、第8回のお話をします。これまで私たちがつくってきた自律型海中ロボットが何をしてきたかをお見せしましたが、それらをまとめて、自律型海中ロボットの効能についてお話ししたいと思います。
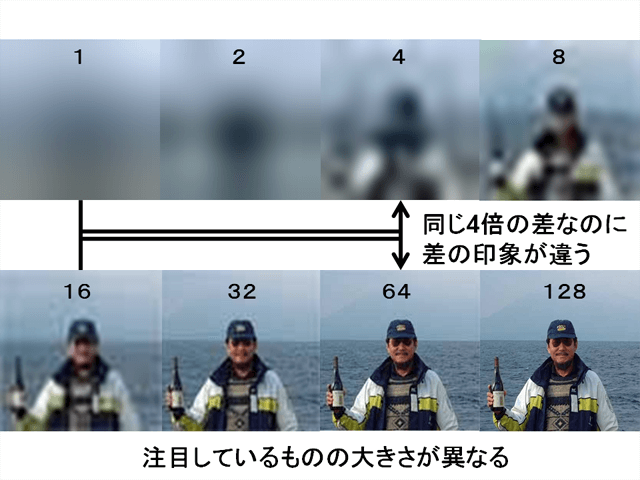
この図は、2010年ごろに作成した自律型海中ロボットが熱水鉱床を調べていくというストーリーです。ここには、自律型海中ロボットの効能が端的に示されています。従来は測量船が海底の地形を調べていました。使っていた道具はマルチビームソナーです。このソナーが1度や2度といった角度の音波を出して調べると、海底の地形図が得られます。しかし、例えば1,000メートルや2,000メートルだと、距離が長いので海底地形図の分解能が悪くなります。例えば、1度のビームは2パーセントですから、1,000メートルの海底なら20メートルの水平分解能の地形図ができます。もっと細かく知るためにはビームの幅を狭くする必要がありますが、その技術はすでにサチュレーション(飽和)していて、これ以上細いビームを出すのはなかなか難しいのが現状です。
それなら、海底に近づけばいいのです。1,000メートルが100メートルになれば、10倍の分解能で海底が見られます。10メートルに近づけば100倍になります。これが、ロボットが海底に進出する意味です。より細かい地形が見えてくると、以前にお示しした伊是名海穴の海底地形図なども細かく見えるわけです。100メートルで2パーセントなら、2メートルの水平分解能で地形図を作れるのです。2メートルまで近づけば写真が撮れますから、ミリメートルオーダーの細かさで分かってきます。
●分解能の高い情報が手に入ると、新しい興味が起こる
このようなストーリーで海底を調査できるわけですが、従来は自律型海中ロボットがなかったために、測量船が作る地形図で満足していました。ところが、海底熱水鉱床などを開発するときには、測量船の20メートルグリッドの図面では不足しており、もっと細かい図面が欲しいということになります。そこに自律型海中ロボットが活躍する道があるのです。
r2D4のような航行型ロボットなら海底まで10メートルや100メートル、Tuna-Sandのようなホバリング型は1メートル、2メートルにまで近づける。より細かい地形図を作ることができます。そこで重要になってくるのは、「いったい何が見たいのか...