


●知見を増やすための海中ロボットの活躍
前回、伊平屋北フィールドで、JAMSTEC(海洋研究開発機構)が地球深部探査船「ちきゅう」で掘って、いろいろ新しいことを発見したと申し上げました。これはとても重要です。実際に「海のジパング計画」で、2014年7月、計画が始まったときに、新たに掘りました。つまり、伊平屋北フィールドというのは、ようやく分かってきたのです。
何を申し上げたいかというと、海底熱水鉱床に関するわれわれの知識はあまりにも少ないのです。前々からずっと、この講義の始めから言っていることです。なので、とにかく熱水鉱床の成因などの科学的知見を速やかに増やさなくてはいけない。「当たるも八卦、当たらぬも八卦」などと、あっちこっち適当に掘っていればいい、といったことをやっていてはいけない。「ちゃんと必ず当たる!」というような調子の知識をわれわれは持たなければいけない。そのためには、一生懸命調査、あるいは研究をしなくてはいけませんね、というわけです。
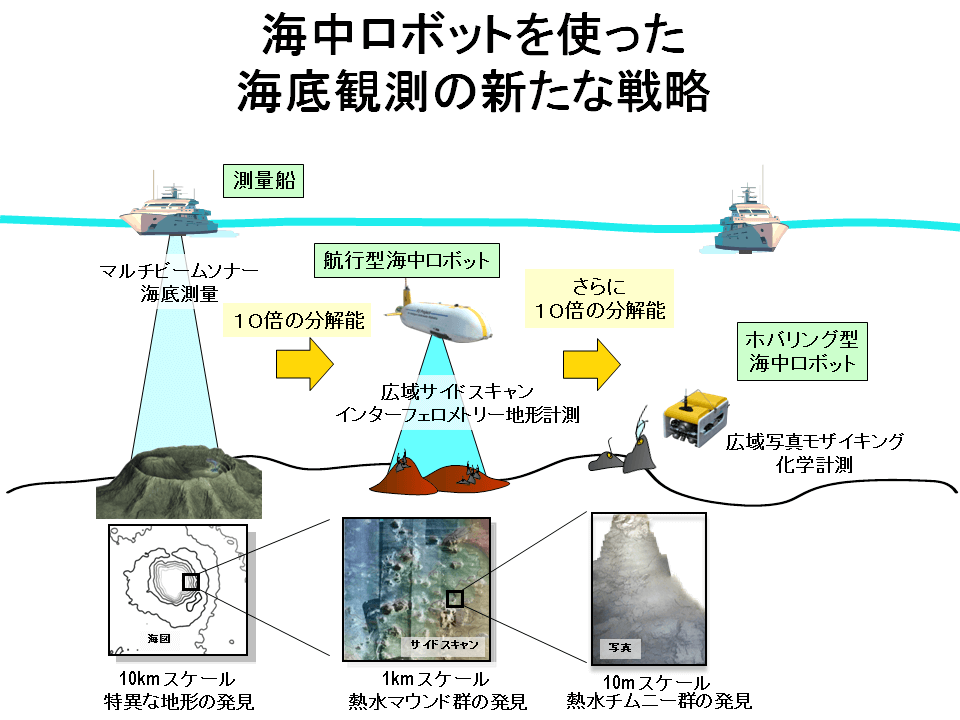
調査するための仕立ては、この3段階です。まず、海底地形を測量船が測ります。これはマルチビームソナーという道具で測るのですが、そうすると海底の地形が分かります。この地形は、どういう具合で分かっているかというと、おおよそ深さの2パーセントの水平分解能で分かります。それは、マルチビームソナーの能力です。つまり、1000メートルの上から測ると、20メートルに1個点があるように示されることで分かります。つまり、20メートルよりも小さいものは、ベタッとなってしまってよく分からないのです。ですから、20メートルより大きなスケールのものは、マルチビームソナーで分かる。
しかし、それでは熱水チムニーがどこにあるとか、細かいことが分からないじゃないか、ということになります。そうすると、どうすればいいかというと、このソナーの精度を上げることは、もう技術的にはほとんどできないので、距離を10分の1にします。つまり、1000メートル上から測っていたのを、ロボットが出かけていって、100メートルの高度でいけばいい。そうすると、10分の1になるから、今度は2メートルのスケールでもでこぼこが分かるということになります。これが、航行型の自律型海中ロボットを使うところです。
そうすると、もっと近づきたくなる。もっと近づくと地形が...